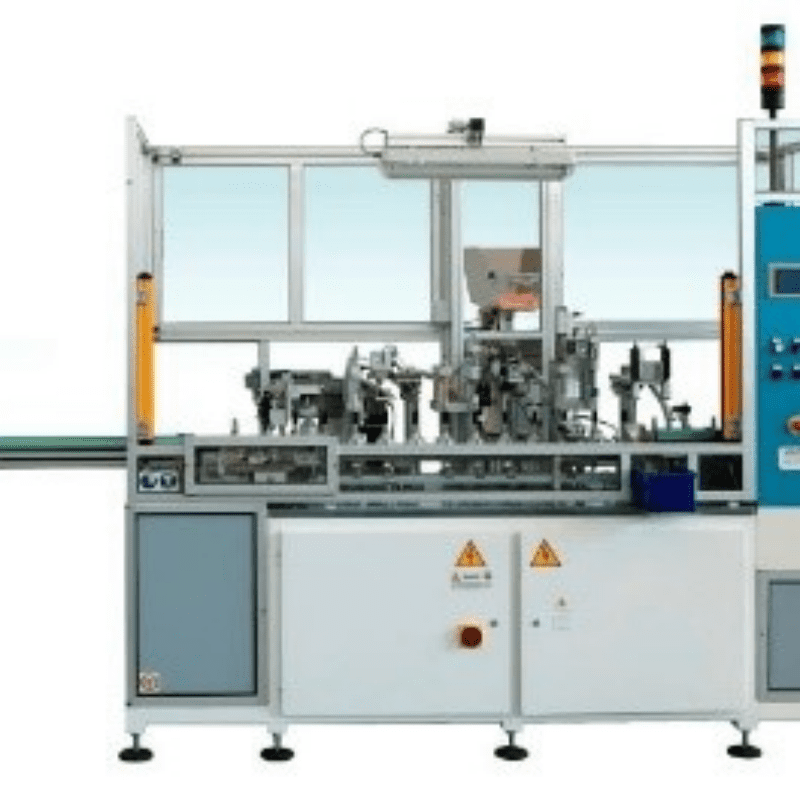
Robotic Irregular-Shaped Metal Part Removal System: Conquering Complexity in Industrial Handling

In industrial manufacturing, the handling of irregular-shaped metal parts—castings, forgings, die-cast components, and custom-machined pieces—has long been a challenge. Traditional methods, relying on manual labor or rigid automation, struggle with inconsistent geometries, heavy weights, and safety risks, leading to inefficiencies, quality issues, and costly downtime. The Robotic Irregular-Shaped Metal Part Removal System emerges as a groundbreaking solution, combining advanced robotics, 3D vision, and adaptive control to transform how factories handle complex components. Designed to tackle parts with asymmetrical forms, sharp edges, or varying surface textures, this system delivers unmatched precision, speed, and safety, revolutionizing processes in automotive, aerospace, and metal fabrication industries.
The Architecture of Precision: Key Components Defined
A state-of-the-art removal system integrates hardware and software to overcome the chaos of irregular geometries:
1. 6-Axis Robotic Arms: Dexterity for Complex Motions
The system’s mechanical core is a high-payload 6-axis robot (5–100kg capacity), offering:
- Full Spatial Freedom: Three rotational (pitch, yaw, roll) and three linear (X, Y, Z) axes enable precise manipulation of parts at any angle—critical for extracting components trapped in tight molds or navigating around protruding features.
- Force-Torque Sensing: Built-in sensors (0.1N force resolution) detect resistance during part removal, preventing damage to both the robot and the workpiece. For example, when extracting a die-cast aluminum engine block with fragile cooling fins, the robot adjusts grip force in real time to avoid bending fins.
- Quick-Change End Effectors: Custom grippers—such as adaptive 爪 (for uneven surfaces), magnetic clamps (for ferrous metals), or vacuum cups (for semi-porous castings)—swap in <15 seconds, adapting to 100+ part types without manual retooling.
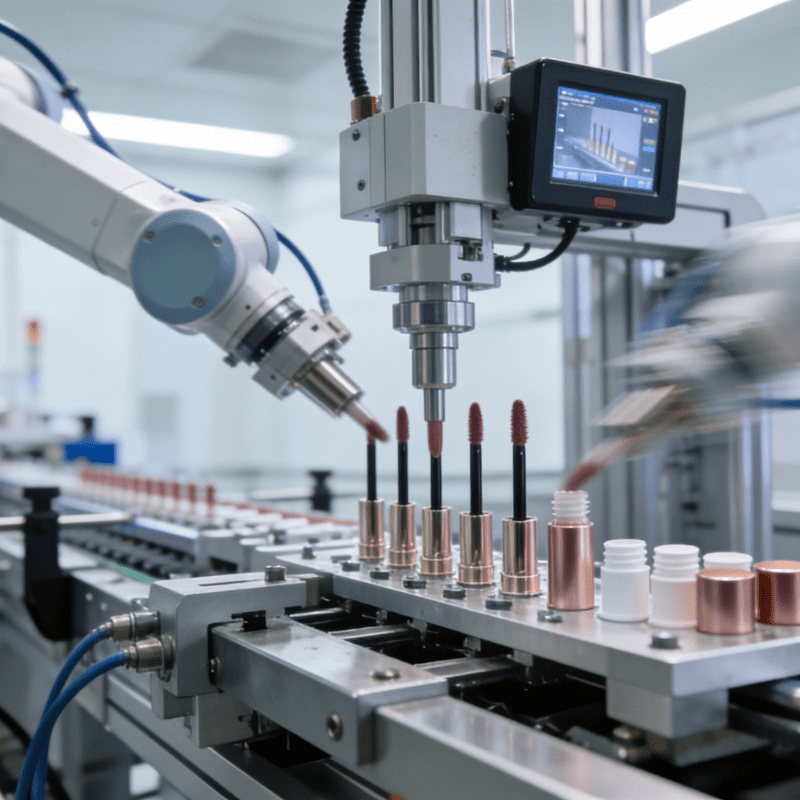
2. 3D Vision Guidance: Seeing the Unseen
A dual-camera 3D laser scanner (0.1mm resolution) paired with AI algorithms solves the “chaotic bin picking” problem:
- Point Cloud Mapping: Creates detailed 3D models of stacked parts, even in poorly lit or dusty environments (common in foundries), to identify optimal grip points (e.g., flat surfaces, recessed slots) with 99.5% accuracy.
- Real-Time Pose Estimation: Calculates the exact position and orientation of each part, even those nested or overlapping, enabling the robot to plan collision-free paths through cluttered bins.
- Defect Pre-Check: Scans for casting flaws (cracks, misruns, or excess flash) before removal, flagging defective parts for rejection and preventing downstream issues.
3. Intelligent Path Planning Software
Machine learning-driven algorithms optimize every movement:
- Dynamic Obstacle Avoidance: Adjusts trajectories in milliseconds to navigate around protruding features (e.g., bolts, ribs, or flash on castings), a task impossible for traditional 2D vision systems.
- Energy-Efficient Motion: Minimizes acceleration/deceleration forces to reduce cycle times by 20% while ensuring smooth part extraction—critical for high-temperature environments (e.g., removing red-hot forgings from presses).
- No-Code Programming: A user-friendly interface lets operators teach new part geometries by simply importing 3D CAD models, reducing setup time from hours to minutes.
Applications: Transforming Heavy-Duty Handling
1. Automotive Casting & Forging Lines
In a die-casting cell producing 10,000 engine blocks daily:
- The system removes 刚成型的 aluminum cylinder heads from molds, using force sensing to break free from residual ejector pins without damaging delicate oil channels.
- For steel forgings (e.g., transmission gears with complex tooth profiles), 3D vision identifies the strongest grip points on the gear’s hub, enabling the robot to lift 30kg parts with repeatable precision (±0.5mm positioning).
Case Study: A major automaker reduced mold damage by 60% and cut part removal time by 40% per cycle, achieving an annual savings of $800K in maintenance and downtime costs.
2. Aerospace Component Manufacturing
For high-value titanium aerospace parts:
- The system handles intricate wing ribs with varying cross-sections, using adaptive grippers with compliant fingers to secure parts without marring their polished surfaces.
- In hot isostatic pressing (HIP) operations, it removes sintered components from furnaces at 1,000°C, equipped with heat-resistant coatings and extended-reach arms to minimize operator exposure to extreme temperatures.
3. Metal Fabrication & Recycling
In a scrap metal yard processing irregular steel scraps:
- Magnetic grippers combined with 3D vision identify and extract sharp, twisted metal sheets from waste piles, improving safety by eliminating manual sorting—a leading cause of workplace injuries.
- For CNC machining centers, the system unloads machined parts with complex contours (e.g., aerospace brackets with 30° angled surfaces), using vision to verify toolpath completion before removal.
Robotic Systems vs. Traditional Methods: A Performance Breakdown
| Metric | Robotic Removal System | Manual/Conventional Automation |
| Part Geometry Supported | All irregular shapes (castings, forgings, scrap) | Simple, symmetrical parts only |
| Positioning Accuracy | ±0.5mm (3D vision-guided) | ±5mm (operator/fixture-dependent) |
| Payload Capacity | 5–100kg (scalable) | 10–20kg (manual); 50kg+ (rigid fixtures) |
| Downtime for Changeover | <10 minutes (software reconfig) | 2–4 hours (fixture replacement) |
| Safety Risk | Eliminates human exposure to heavy, hot, or sharp parts | High risk of musculoskeletal injuries or burns |
Technological Innovations Shaping the Future
1. AI-Powered Grip Optimization
Deep learning models analyze 10,000+ part geometries to recommend the best gripper type and grip points, reducing trial-and-error during new part onboarding by 80%. For example, it can distinguish between a cast iron manifold (best gripped by its flat base) and a forged steel crankshaft (best gripped by its journals).
2. Self-Calibrating Systems
Integrated laser scanners automatically recalibrate the robot’s position relative to the workcell every 30 minutes, compensating for thermal expansion (common in foundries) or mechanical wear, ensuring consistent performance over 24/7 operations.
3. IoT-Enabled Predictive Maintenance
Cloud-based analytics track gripper wear, motor torque, and vision system accuracy in real time, sending alerts when components (e.g., gripper pads, camera lenses) need replacement—reducing unplanned downtime by 50%.
The Business Case: Investing in Complexity Management
1. ROI Through Safety and Efficiency
- Labor Cost Reduction: Replaces 2–3 human operators in hazardous handling tasks, with a typical payback period of 12–18 months in high-labor-cost regions.
- Quality Assurance: Consistent grip and motion control reduce part scrap rates by 70%, critical for industries where a single damaged aerospace part can cost $10,000+ in materials and rework.
- Scalability: Modular design allows easy integration with existing conveyors, presses, or CNC machines, adapting to both high-mix low-volume (HMLV) and high-volume production environments.
2. Future-Proofing for Industry 4.0
- Batch Size 1 Feasibility: Handles one-off custom parts or low-volume prototypes without retooling, ideal for manufacturers embracing mass customization.
- Data-Driven Insights: Aggregates handling data (grip force, cycle times, defect rates) to optimize upstream processes—e.g., identifying mold design flaws that cause part sticking.
The New Standard in Heavy-Duty Automation
As industrial components grow more complex and production demands intensify, the Robotic Irregular-Shaped Metal Part Removal System emerges as a non-negotiable asset. It turns the chaos of irregular geometries into a controlled, repeatable process, combining the brute strength of heavy-duty robotics with the finesse of AI and 3D vision. From automotive foundries to aerospace clean rooms, this technology doesn’t just solve today’s handling challenges—it sets the stage for a future where no part is too complex, too heavy, or too hazardous for automated precision.
#RoboticIrregular Part Handling #3DVision Guided Robotics #Precision Metal Part Removal