The New Paradigm of Human-Machine Collaboration in Non-Standard Automation Equipment: The Efficiency Revolution from “Machine Replacement” to “Human-Machine Integration”
Introduction: When a Robotic Arm “Crushes” Sponge —— The Collaboration Dilemma and Breakthrough of Traditional Automation
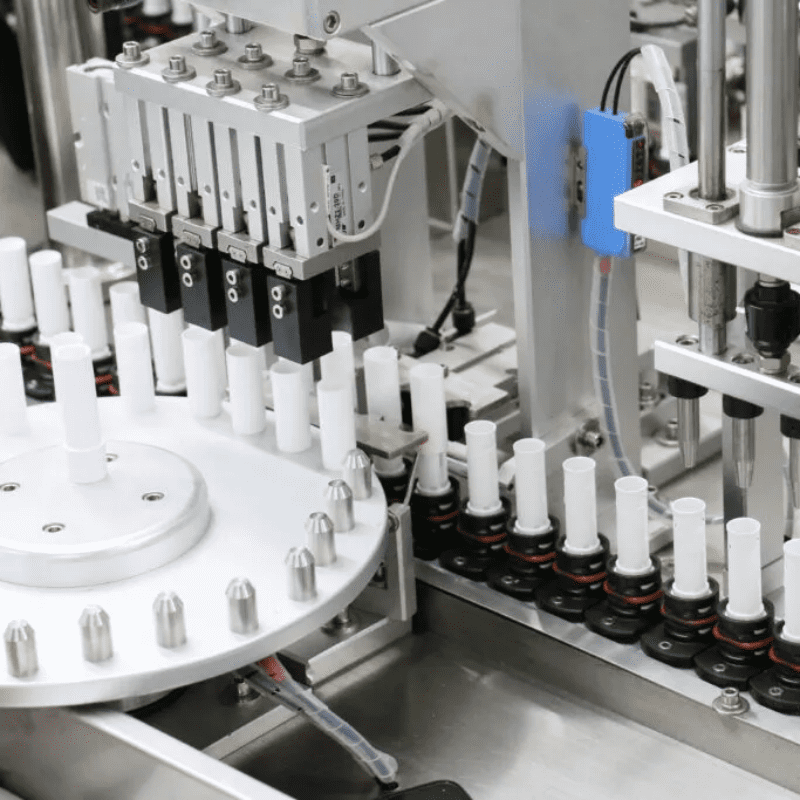
In an automotive seat factory, a ¥2 million robotic arm attempted to grasp memory foam pads but caused indentation defects in 20% of pads due to rigid grippers unable to sense pressure. When manual intervention was needed for correction, 3 collision accidents occurred because the robotic arm lacked safety sensors. Eventually, a traditional automated production line with “human-machine isolation” required 8 workers to “guard” it, achieving only 30% efficiency improvement over pure manual labor. This reveals the deep contradiction of non-standard automation: simply “replacing humans with machines” has hit a bottleneck, and “human-machine integration” is the future.
I. From “Isolated Collaboration” to “Integrated Symbiosis”: Three Evolutionary Stages of Human-Machine Collaboration
▶ 1.0 Era: Physical Isolation of “Human-Machine Division” (Before 2010)
- Features: Robotic arms operate behind guardrails, while workers load/unload materials outside, interacting via buttons/barcode scanning;
- Pain Points: Long model change time (over 30 minutes), disconnected human-machine interaction (manual power-off troubleshooting for equipment failures);
- Case: In a hardware stamping line, the robotic arm stamps at 10 times/minute, but manual loading/unloading takes 8 seconds each time, resulting in only 40% overall efficiency improvement.
▶ 2.0 Era: Safe Collaboration of “Limited Contact” (2015-2020)
- Technical Breakthroughs:
- Safety light curtains (e.g., SICK C40, detection accuracy 15mm): When a human enters the 1.5m range, the robotic arm automatically decelerates to 0.2m/s;
- Two-hand start buttons: Force workers to keep both hands away from danger zones to avoid misoperations;
- Case: In a 3C electronics screen bonding line, after workers place glass covers, the robotic arm automatically bonds via a force control system (pressure ≤10N), improving human-machine collaboration efficiency to 80 pieces/hour (50 pieces manually, 70 pieces purely robotic).
▶ 3.0 Era: Intelligent Integration of “Seamless Collaboration” (Since 2025)
- Core Features:
- Force-controlled robotic arms (e.g., UR10e, force resolution 0.1N): Sense a 5N thrust from workers and automatically adjust movement paths (e.g., avoidance or following);
- Voice interaction systems: Workers say “pause current batch,” and the equipment immediately saves progress and enters standby;
- Case: In a new energy battery PACK line, workers and robotic arms jointly assemble battery modules:
- Robotic arms precisely tighten bolts (torque ±0.5N・m), while workers quickly plug cables (relying on human finger dexterity);
- Collaboration efficiency reaches 120 modules/hour, improving by 33%-100% compared to pure robotic arms (90 modules) or pure manual labor (60 modules).
II. Four Core Technologies of Human-Machine Collaboration: Enabling Machines to “Understand Safety, Gauge Force, and Communicate”
▶ 1. Force Control Technology: Endowing Machines with “Tactile Sense” to Avoid “Violent Collaboration”
- Technical Principles:
- 6D force sensors (e.g., ATI Nano17) collect force/torque data in real-time, converting force signals into position compensation via impedance control algorithms (e.g., when a worker pushes the robotic arm, the equipment follows at 0.5m/s);
- Typical Application: In precision assembly scenarios, the robotic arm senses a 0.2N resistance mutation and immediately stops and alarms (e.g., catheter insertion in medical devices, reducing manual mis-touch risks to 0).
- Data Comparison:
| Indicator | Traditional Robotic Arm | Force-Controlled Collaborative Robotic Arm | Manual Operation |
| Contact Force Control | None | ±0.5N | ±2N |
| Collision Response Time | 200ms | 50ms | – |
| Collaboration Safety Level | ISO 13849 PLd | ISO 13849 PLe | – |
▶ 2. Safety Sensing System: Building a “Dynamic Safety Zone” for “Human-Machine Dance”
- Three-Layer Protection System:
- Environmental Sensing: 3D vision cameras (e.g., Kinect Azure) model in real-time, generating heat maps of worker positions for robotic arms to avoid “occupied human areas”;
- Contact Warning: Skin 式 pressure sensors (e.g., FlexiForce) cover the robotic arm surface, triggering “safe stop” upon detecting 5N pressure (traditional safety light curtains only detect intrusion, not contact);
- Speed Control: Based on ISO/TS 15066 standards, when the distance between the robotic arm and human body is <500mm, speed is automatically limited to 0.15m/s (about 1/3 of human walking speed).
- Case: In an intelligent lock assembly line, workers can directly “guide” the robotic arm to adjust the lock core angle by hand, with the equipment synchronizing human movements in real-time, reducing assembly time from 20s/unit to 12s/unit with zero collision accidents.
▶ 3. Natural Interaction Interface: Enabling Equipment to “Understand Human Language and Gestures”
- Multimodal Interaction:
- Voice Recognition: Supports command recognition in industrial noise environments (75dB) (e.g., “switch to door lock model B” with 98% recognition rate);
- Gesture Control: Via Leap Motion sensors, workers can wave to call up equipment status interfaces (traditional button operation takes 5s each time);
- AR Assistance: Hololens 2 displays real-time guidance (e.g., “current torque insufficient, need to increase by 2N・m”), shortening novice worker training cycles from 2 weeks to 3 days.
- Data: After introducing AR interaction in an auto parts factory, worker operation error rates dropped by 60%, and equipment parameter adjustment time was reduced from 8 minutes/operation to 2 minutes/operation.
▶ 4. Collaborative Scheduling Algorithms: Maximizing Efficiency by Letting Humans and Machines “Play to Their Strengths”
- Task Allocation Logic:
- Machines excel at: High-precision repetitive operations (e.g., screw tightening, torque deviation ±0.1N・m), hazardous environment work (e.g., lithium battery liquid injection, risk of electrolyte contact);
- Humans excel at: Complex decision-making (e.g., judging processing methods for multi-defect products), flexible operations (e.g., manual calibration of irregular parts);
- Algorithm Implementation:
- Dynamically allocate tasks via reinforcement learning (PPO algorithm), e.g., in a 3C detection line, when the defect rate >5%, automatically switch to “manual re-judgment + machine sorting” mode, improving yield by 3.2%;
- Optimize human-machine movement trajectories to avoid path conflicts (e.g., while the robotic arm picks materials, workers simultaneously sort materials, increasing time utilization from 60% to 85%).
III. Industry Application Breakthroughs: Human-Machine Collaboration Reconstructs Production Logic
▶ 1. 3C Electronics: “Flexible Collaboration” for Small Batches and Multiple Varieties
- Scenario: Smartwatch strap assembly (needing to adapt to 3 materials: metal/ceramic/leather, each with 10+ specifications);
- Collaboration Mode:
- Robotic Arm: Quickly changes grippers (3-second switch), precisely bonds strap buckles (position deviation ±0.05mm);
- Workers: Visually identify minor strap scratches (machine vision missed detection rate 0.5%), and adjust decorative part combinations according to customer orders;
- Achievements: Model change time reduced from 40 minutes to 10 minutes, order response speed improved by 75%, and manual efficiency doubled compared to pure manual labor (due to reduced repetitive picking/placing actions).
▶ 2. New Energy: “Safe Integration” in High-Risk Scenarios
- Scenario: Lithium battery electrode coating (slurry contains corrosive electrolyte, traditional manual labor requires protective suits, low efficiency);
- Collaboration Mode:
- Robotic Arm: Completes coating in a sealed glove box (precision ±0.01mm), while workers adjust the coating head angle via force feedback handles outside the box;
- Safety Mechanism: Detects glove box leakage (gas sensor response), robotic arm automatically returns to position, worker terminal triggers vibration alarm and cuts power;
- Achievements: Worker exposure risk reduced to 0, coating efficiency improved by 50%, and supports “minimum order of 100 pieces” for small-batch trial production (traditional equipment requires minimum 1,000 pieces).
▶ 3. Medical Devices: “Precision Collaboration” Under Compliance Requirements
- Scenario: Aseptic assembly of syringe pistons (ISO 5 class cleanroom, 12% contamination risk in manual assembly);
- Collaboration Mode:
- Robotic Arm: Completes piston pressing under a laminar flow hood (pressure control ±0.1N, angle deviation ±0.5°);
- Workers: Transfer materials through a pass-through window and inspect assembly tightness with an endoscope (machine vision cannot detect minor wrinkles);
- Achievements: Contamination rate reduced from 12% to 0.3%, meeting FDA 21 CFR Part 11 electronic record requirements, while saving 30% equipment costs compared to pure robotic arm solutions (by reducing complex vision systems).
IV. Future Trends: Three Evolutionary Directions of Human-Machine Collaboration
▶ 1. Physical Integration: Soft Robots Enable “Zero-Harm” Collaboration
- Technology: Bionic silicone robotic arms (e.g., FESTO BionicSoftHand), achieving ±0.5N force control via pneumatic drive, safely grasping raw eggs (traditional robotic arms require customized soft grippers with ±2N force control precision);
- Application: Bread sorting in the food industry, where humans and machines jointly organize shelves, and the robotic arm automatically “rebounds” when touching a worker’s arm, eliminating the need for shutdown.
▶ 2. Cognitive Integration: Brain-Computer Interfaces Enable “Mind Collaboration”
- Progress: Neuralink-like brain-computer interface technology has been piloted in industrial scenarios, allowing workers to control robotic arm grabbing via 意念 (delay ≤100ms), freeing hands for other operations;
- Scenario: Complex component assembly in aerospace, where workers focus on spatial positioning, and robotic arms simultaneously perform high-precision screw tightening, improving collaboration efficiency by 40%.
▶ 3. Ecological Integration: Human-Machine Data Closed Loop Drives Continuous Optimization
- Mechanism: Worker operation habit data (e.g., commonly used torque values, material placement preferences) feedback to equipment algorithms, automatically generating personalized collaboration strategies;
- Case: A bearing factory collected assembly data from 30 workers to optimize robotic arm movement trajectories, increasing skilled worker efficiency by 15% and enabling new workers to reach 80% of skilled worker productivity.
V. The “Efficiency Formula” of Human-Machine Collaboration: The Underlying Logic of 1+1>2
- Traditional automation pursues “machine replacement of humans,” with the efficiency formula:
E = Machine Efficiency × (1 – Manual Participation Rate); - Human-machine collaboration pursues “complementary human-machine advantages,” with the efficiency formula:
E = (Machine Precision + Human Flexibility) × Collaboration Safety Coefficient.
When a new energy enterprise’s battery module production line achieves a collaborative model of “robotic arm tightening + worker plugging,” efficiency improves by 33% compared to pure robotic arms and 100% compared to pure manual labor, with yield increasing from 95% to 99.2%—proving that human-machine collaboration is not an “either-or” choice but an evolution of “advantage stacking.”
Conclusion: Human-Machine Collaboration Redefines “Automation”
In the era of personalized production, the ultimate form of non-standard automation equipment is not a “lights-out factory” but an “intelligent workshop”—where machines handle “precise repetition,” and humans focus on “creative decision-making,” achieving seamless collaboration through force control, safety, and interaction technologies. When robotic arms can “shake hands gently” and workers can “control via ,” non-standard equipment can truly solve production challenges of “multiple varieties, small batches, and high compliance,” moving industrial manufacturing from “cold automation” to “warm intelligence.”
(Next Preview: “The Sustainable Development Path of Non-Standard Automation Equipment: Green Design, Energy Consumption Optimization, and Full Life Cycle Management”, analyzing how to integrate ESG concepts into customized equipment, respond to global carbon neutrality goals, and achieve a win-win for economic and environmental benefits.)