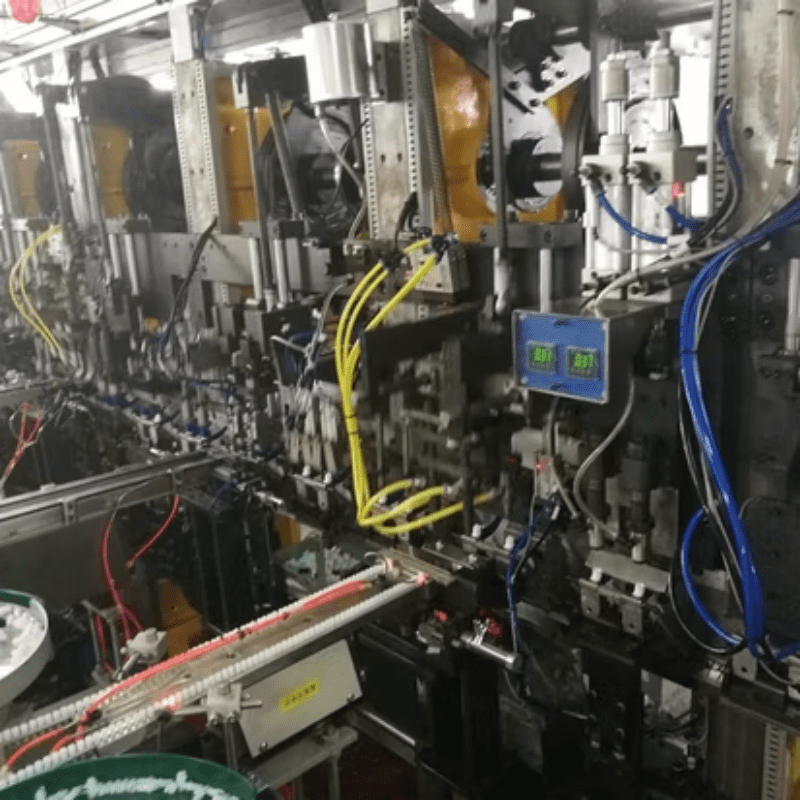
In the production chain of small products such as electronic components, medical consumables, and precision hardware, the “tray loading” link is often regarded as a “microscopic battlefield” — millimeter-scale products (such as 0402 chip resistors, 3mm-diameter medical needles) need to be neatly arranged in tray grooves in a fixed posture, ensuring no overlapping, no misalignment, and meeting the high-speed flow of thousands of pieces per hour. Traditional manual loading is not only limited by visual fatigue and hand precision but also difficult to adapt to the flexible production needs of multiple varieties and small batches. The emergence of the Robotic Small Product Tray Loading System, with the triple collaboration of “vision + machinery + algorithm”, is redefining the automated loading standards for micro-products and becoming a key node connecting precision manufacturing and intelligent warehousing.
From “Manual Sorting” to “Machine Replacement”: Four Breakthroughs in Core Functions
The core value of the robotic small product tray loading system lies in transforming the entire process of “sorting – positioning – arranging – verification” into closed-loop automation. Its working logic revolves around four core functions, accurately solving the pain points of small product loading:
Micron-Level Grasping: Taming the “Tiny on Fingertips”
The biggest challenge for small products is “fragility” and “slipperiness” — for example, 0.5mm-thick electronic films and 2mm-diameter glass beads, which are easily deformed or dropped when grasped manually. The system is equipped with a combination of “micro-end effector + force control sensor”, which can dynamically adjust the grasping strategy according to product characteristics: for lightweight plastic parts, “vacuum suction cup + flexible buffer” is adopted (suction force is accurate to 0.1N) to avoid adsorption deformation; for small metal hardware, “two-finger micro-mechanical claws” (claw tip diameter 0.3mm) are used, and the clamping force is controlled through force feedback (error ≤0.05N) to ensure stable and damage-free grasping. With a 3D vision sensor (resolution up to 12 million pixels), the system can real-time identify the placement angle of products (such as the pin orientation of chips), guide the robotic arm to complete ±0.1mm posture calibration, and achieve “grasping is precise alignment”.
Intelligent Sorting Algorithm: Let Each Groove “Find Its Place”
The efficiency bottleneck of tray loading often lies in how to achieve “high density + no interference” arrangement in limited space. The system’s built-in “dynamic layout algorithm” can automatically generate the optimal arrangement scheme based on tray size, product specifications, and order requirements: for example, for 5mm-long medical catheters, the algorithm will prefer “parallel staggered arrangement” to increase the tray space utilization to 92%; for electronic connectors with pins, the path is planned according to the principle of “consistent pin orientation” to avoid pin entanglement between adjacent products. More importantly, the algorithm supports “multi-variety mixed loading” — when 3 different specifications of micro-bearings need to be loaded in the same tray, the system can complete the layout scheme switching within 10 seconds, which is 20 times more efficient than manual planning.
Flexible Adaptation: One Robot Handles “Hundreds of Products”
The multi-specification characteristics of small products (such as from 1mm screws to 10mm micro-motors) put forward high requirements for equipment compatibility. The system adopts a “modular quick-change” design: the end effector supports magnetic replacement (changeover time ≤30 seconds), which can adapt to 8 types of tools such as suction cups, mechanical claws, and magnetic heads; the vision system has a built-in “product database” (pre-storing 3D models of 500+ common small products). When importing new products, only 3 pictures from different angles need to be taken, and the algorithm can automatically generate identification parameters without re-programming. A case from an electronic foundry shows that the system can switch from “loading 0402 resistors” to “loading 5mm micro-switches” within 1 hour, which is 67% more efficient than traditional special equipment (which requires 2 hours for changeover).
Full-Process Verification: Eliminating “Millimeter-Level Errors”
Loading errors of small products (such as missing loading, reverse loading) are often hidden and difficult to detect, but may lead to batch scrapping in downstream assembly links. The system sets “two-dimensional verification” after loading: first, “visual comparison”, which takes a panoramic view of the tray through an industrial camera and performs pixel-level comparison with the preset standard layout (recognition accuracy up to 0.01mm) to quickly locate misplaced or missing products; second, “weight re-inspection”, the high-precision weighing sensor at the bottom of the tray (range 0-500g, accuracy 0.01g) can identify missing loading through single-slot weight deviation (for example, a groove should hold 3 screws but only 2, with a weight difference of 0.2g). With double verification, the loading error rate can be reduced from 3% manually to below 0.05%.
Technical Core: Three “Black Technologies” Supporting Precise Loading
The “millimeter-level precision” of the system is not accidental, but the result of the collaboration of three core technologies, building a full-chain control system from perception to execution:
AI Visual Positioning System: Let Machines “See” the Microscopic World
Traditional vision systems are difficult to deal with the “high reflection” and “high similarity” problems of small products (such as silver chip resistors and capacitors, which are almost identical in appearance). The system’s “multi-spectral vision + deep learning” solution can switch through 4 light sources (infrared, ultraviolet, ring white light, coaxial light) to highlight the differentiated characteristics of products — for example, when identifying transparent glass beads, ultraviolet light is used to excite fluorescent markers to easily distinguish different batches; when sorting similar electronic components, AI algorithms learn subtle differences such as the number of pins and surface silk screens, with an identification accuracy of 99.98%. More importantly, the “dynamic exposure adjustment” function of the vision system can adapt to high-speed movement scenarios (robotic arm movement speed up to 1.5m/s), ensuring the clarity of each frame of image and avoiding positioning deviations caused by motion blur.

Collaborative Control Algorithm: Seamless Linkage of “Hand, Eye, and Brain”
There is often a contradiction between “high speed and precision” of robotic arms — excessive speed easily causes vibration, affecting positioning accuracy; too slow restricts efficiency. The system’s “predictive trajectory planning algorithm” can solve this contradiction: based on the motion inertia of products (such as the gravity difference between plastic parts and metal parts), the algorithm plans the deceleration point 0.5 seconds in advance, so that the robotic arm automatically reduces the speed from 1m/s to 0.1m/s when approaching the tray, ensuring the end positioning accuracy (±0.05mm) without sacrificing overall efficiency. At the same time, the algorithm supports “multi-robot collaboration”: when a single robot cannot meet the production capacity demand, 2-4 robots can communicate in real-time through the industrial bus, automatically assign loading areas (such as robot A is responsible for the left half of the tray, robot B for the right half), avoid path conflicts, and the overall efficiency increases linearly with the number of robots.
Error Prevention and Traceability System: “Building Files” for Each Small Product
The system’s built-in industrial Internet of Things module can record key data of each loading: product model, loading time, tray number, robotic arm operation parameters, etc., forming a “one item, one code” traceability file. When a tray of products is found to be defective in the downstream link, it can quickly trace back to the loading link by scanning the code (such as checking whether there was a misjudgment in the visual image at that time, whether the mechanical claw force was abnormal), shortening the problem troubleshooting time. More intelligently, the system will automatically count “high-frequency error types” (such as a high missing rate of a certain specification of products), trigger parameter optimization suggestions (such as increasing the suction of the product by 10%), and realize “error self-iteration”.
Scene Implementation: Efficiency Leap from Micro to Macro
In the “microscopic battlefields” of different industries, the robotic small product tray loading system is promoting production upgrading with “millimeter-level precision”:
Electronic Components Industry: “0.1mm-Level Queue” of Chip Resistors
In a semiconductor factory producing 0402 规格 (0.4mm long, 0.2mm wide) chip capacitors, traditional manual loading requires a magnifying glass, with a maximum of 800 pieces per hour and a misloading rate (such as reverse direction) of 5%. After introducing the system, 3D vision can identify the polarity mark of the capacitor (a 0.05mm-diameter small black dot), and the robotic arm arranges them according to the “consistent polarity” principle, with the loading capacity increased to 3000 pieces per hour and the misloading rate reduced to below 0.03%. More importantly, the system can be compatible with the mixed loading of 12 types of chip components, meeting customers’ “small batch and multi-specification” order needs, and the order response speed is shortened from 2 days to 4 hours.
Medical Consumables Industry: “Contactless Loading” in Aseptic Environment
In the production of infusion needles (3mm in diameter, 10mm in length), manual loading is prone to product scrapping due to hand bacterial contamination. The system adopts a “fully enclosed working chamber + sterile air source” design, the end effector is sterilized by EO, and ultraviolet disinfection is automatically triggered every 1000 pieces loaded. By visually identifying the needle tip orientation (to avoid wear caused by the needle tip contacting the tray), the system can arrange the needles neatly with “needle tips upward”. The entire loading process is free of manual contact, increasing the sterility qualification rate from 92% to 99.9%, and reducing the annual scrapping loss caused by contamination by more than 2 million yuan.
Precision Hardware Industry: “High-Density Arrangement” of Tiny Screws
An auto parts factory needs to load M1.6 (1.6mm in diameter) micro screws into trays at “20 pieces per row” (groove spacing 2mm). Manual arrangement often causes screws to overlap due to hand shaking, with an effective loading capacity of only 1200 pieces per hour. The system uses a combination of “vibratory feeding + visual positioning”: first, the vibratory plate sorts the screws with “heads upward”, then the robotic arm arranges them according to the “equidistant staggered” algorithm (adjacent screws are staggered by 0.5mm to avoid collision), achieving a loading capacity of 4000 pieces per hour, with the tray space utilization increased to 95%, no overlapping, no inclination, perfectly adapting to the grasping needs of downstream automatic screw tightening equipment.
Future Evolution: From “Loading Equipment” to “Intelligent Micro-Factory Node”
With the deepening of intelligent manufacturing, the robotic small product tray loading system is upgrading from an independent device to a core node of the “micro-manufacturing network”, and will show three trends in the future:
AI Self-Learning Optimization
By accumulating massive loading data (optimal grasping parameters under different materials and environments), the system can independently iterate algorithms: for example, finding that “when humidity > 60%, the adsorption force of plastic parts needs to be increased by 15%”, automatically adjusting the vacuum suction cup parameters; identifying that “the arrangement efficiency of circular products is 20% higher than that of square ones”, prioritizing more dense layout schemes for circular products, achieving “more efficient with use”.
Dual Optimization of Energy and Space
Adopting “carbon fiber robotic arm + servo motor energy recovery” technology, the equipment energy consumption is reduced by 30%; at the same time, through the “foldable working chamber” design, the system’s floor area is compressed to 1.5㎡ (traditional equipment requires 3㎡), adapting to the compact layout of small workshops.
Cross-Scene Collaborative Network
After accessing the industrial Internet platform, the system can form a data closed loop with upstream micro-injection molding machines and downstream automatic packaging machines: dynamically adjust the loading rhythm according to the output speed of the injection molding machine (such as automatically starting the standby robotic arm when the output surges); plan the tray arrangement in advance according to the packaging order requirements (such as adapting to the packaging specification by “200 pieces per tray”), realizing the full-process unmanned operation “from production to packaging”.
From the “chip array” in electronic workshops to the “needle matrix” in medical factories, the value of the Robotic Small Product Tray Loading System has long gone beyond the scope of “replacing manual labor”. With “micron-level precision” and “millisecond-level response”, it makes the manufacturing of small products no longer restricted by “smallness” but becomes an advantage of flexible production — in this era of “smaller is more precise”, such automated systems focusing on microscopic scenes are quietly promoting the manufacturing industry to break through towards “extreme precision” and “extreme flexibility”.